| |
| 5.2 3次元ハプティックデバイス 担当:藪田研究室 |
| |
 可動範囲を拡大するために,3自由度のパラレルリンク機構を有したデバイスです.(学生が一から設計,作製しました)これを用いて,制御モデルが操作に及ぼす影響を調べ,さらには文字や図形の教示などにも応用を広げています。実世界では実現不可能な実験条件での人間計測ができるので,更なる発展が期待されるテーマです。 可動範囲を拡大するために,3自由度のパラレルリンク機構を有したデバイスです.(学生が一から設計,作製しました)これを用いて,制御モデルが操作に及ぼす影響を調べ,さらには文字や図形の教示などにも応用を広げています。実世界では実現不可能な実験条件での人間計測ができるので,更なる発展が期待されるテーマです。
|
| 5.3 2次元ハプティックデバイス 担当:藪田研究室 |
| |
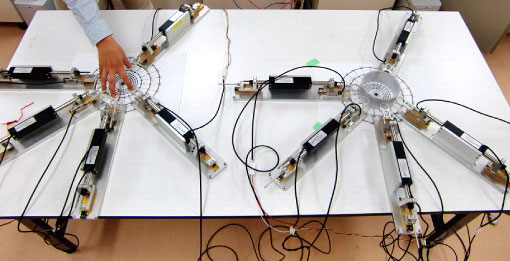
 より単純な動作を教示することを目的として,水平面のみ動作可能なデバイスを作製しました。 より単純な動作を教示することを目的として,水平面のみ動作可能なデバイスを作製しました。
一人の人が二機のデバイスを両手で操作することで,仮想空間の物体を掴み,大きさを認識するような人間の知覚メカニズムの分野にも展開しています。
|
| 5.4 人間計測:2次元画像のなぞり運動・3次元物体の把持運動 担当:藪田研究室 |
| |
画面上の表示図形をなぞる際,人間の視線と上肢の運動にはどのような関係があるのか調べました。円を描くときには,視覚情報によって視線運動が3パターンに分類できることを明らかにし,“精度良く”や“素早く”のような描画方針の強制によって視線運動パターンが統制できることが分かりました。また、前述の2次元対象を3次元に発展して,視線と上肢の運動の関連を調べています。
|


|
| 5.5 環境の知能化 担当:濱上研究室 |
| |
様々なセンサや画像処理技術を統合し,ヒト・モノ・コトの相互作用から生じる知的な振る舞いを獲得する知的環境の研究。
|
2次画像想起に基づく自律移動ヘリ
 |
|
知的車椅子
 |
|
|
| 5.6 医療福祉支援システムの開発研究 担当:下野研究室 |
| |
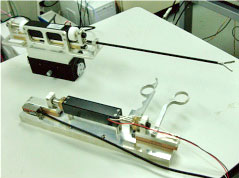
触覚フィードバック機能を有する低侵襲性外科手術支援ロボットやリハビリテーション支援システムなど、医療福祉支援のためのシステムの開発を行っています。
|


|
| 5.7 力覚情報に基づいた手指動作解析 担当:下野研究室 |
| |
マスタ・スレーブ型の遠隔操作ロボットを用いて手指動作の運動と力加減を計測することで、動作の巧さや把持物体の特徴を解析する技術を研究しています。 |
 |
|
|

