■お問い合わせ
ENGLISH
/
日本語
Home
ロボティクス
モーションコントロール
アクチュエータ
パワーエレクトロニクス
システムインテグレーション
活動実績
メンバー紹介
3.アクチュエータ
Actuator
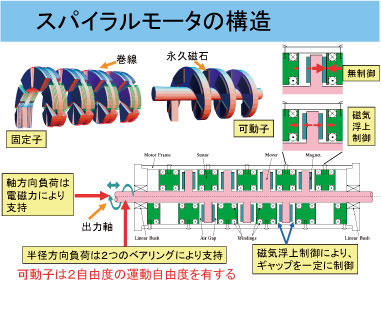
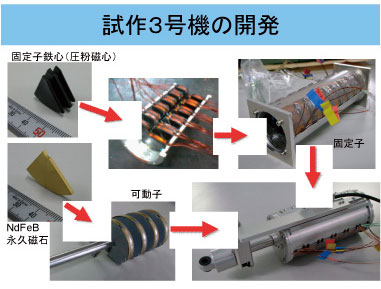
3.1 安全な小型・高速力ダイレクトドライブアクチュエータ 〜スパイラルモータ〜
担当:藤本研究室
本研究では、ギアが不要で推力が大きいダイレクトドライブ式スパイラルモータを動力とした高出力・柔軟ヒューマノイドロボットを開発している。バックラッシやロストモーション、摩擦などが少ないため、高精度・広帯域・高ダイナミックレンジの力制御・位置制御が期待できる。これにより広帯域かつ高出力の全身運動制御システムを実現することを目的とする。
Copyright © 2012 Research Center for Robotics and Mechatronics. All rights reserved.