■お問い合わせ
ENGLISH
/
日本語
Home
ロボティクス
モーションコントロール
アクチュエータ
パワーエレクトロニクス
システムインテグレーション
活動実績
メンバー紹介
1.ロボティクス
Robotics
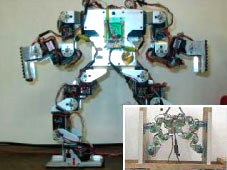
1.1 2足歩行ロボットMARI-3
担当:河村研究室
高速歩行やロバスト歩行を目指して、2足歩行ロボットMARI-3を製作した。13軸(片足6軸、胴体1軸)でRONバスを
装備。
5.1 MARI-3
1.2 イモムシ型ロボット(静的な運動)
担当:藪田研究室
初めはその場で無秩序に動いているロボットが前進移動距離を報酬にすることで,前へ前へ進んでいきます。静的な運動を行うロボットとしては,一次元のイモムシから,二次元のヒトデ,そして三次元のヤモリと進化してきました。
1.3 大車輪ロボット(動的な運動)
担当:藪田研究室
人間の腰,股,膝関節を模擬してモータを配置し,強化学習によって大車輪運動を実現するためのロボットです。大車輪運動には励振モードと大車輪モードがあり,励振モードをいかに脱出するかなど,学習アルゴリズム及び力学的な観点から研究を行っています。
1.4 フィンガーアームによる物体把持
担当:藪田研究室
物体を把持するための内力インピーダンスと外力に対する外力インピーダンスを制御することで、物体を左右に動かしてもフィンガが把持し続けるアルゴリズムを研究しています。
1.5 フィンガーアームによるヨーヨー運動
担当:藪田研究室
数理モデルも視覚情報も用いずに,素早い運動を伴う能動的なタスクの実現を目的としました。
人間によるヨーヨー運動を計測解析することで抽出した技能を,ロボットへ埋め込むため制御アルゴリズムを提案し,力覚と時間間隔飲みによる,持続的なヨーヨー運動を実現しました。
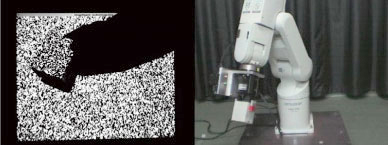
1.6 ロボット教示
担当:前田研究室
人間が行うロボットへの動作教示の負担を減らし,多様な環境で多様な作業が行えるようにするための手法を研究している。
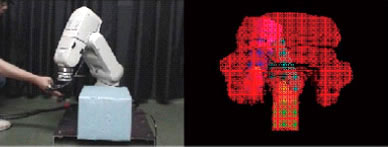
1.7 マニピュレーションの力学解析と計画
担当:前田研究室
物体の把持や操りの可否やその質を力学的に評価し,それに基づいてロボットの動作を自動生成する手法を研究している。
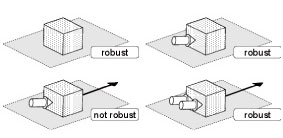
1.8 幾何ベーストマニピュレーション
担当:前田研究室
物体を幾何学的に閉じ込めるケージングの概念を利用し,力センシングや力制御が不要な操り手法の開発を行っている。
1.9 小型人型ロボットによる壁登りの実現
担当:杉内研究室
近年、社会では様々な小型二足歩行ロボットに関する研究が行われています。そして現在小型ロボットは、その小型・軽量である点を生かして地震や津波などの災害が起きた後に人間が足を踏み入れることが困難な不整地での活動や、家庭などの私達人間の生活空間内での活動を求められています。しかし、これらのロボットが活動できる範囲は現在の所、極僅かな空間に限られています。瓦礫の山や階段など、障害物が多く存在している空間では、小型二足歩行ロボットは自由に行動することが難しい状況です。本研究では、そのような空間でも自由に行動することが可能なロボットの実現を目指しています。その目的を達成するための第一ステップとして、小型人型ロボットによる壁の間の垂直よじ登り動作の実現を行います。
1.10 「小型二足ロボットによるスケート運動の実現」
担当:杉内研究室
本研究においては、ロボットの可能な行動を増やしていくことを目指し、ロボットによるスケート運動を実現させることを目的としています。近年、ロボットにスケート運動を行わせる研究が数多くあります。例として、胴体に腕を取り付け、腕の振りによって揺動を発生させるものがあります。しかしそれは、ロボットを複数の剛体の組み合わせとして考えなければならず、その為に前進などの各動作における計算・解析はどうしても複雑なものになってしまいます。そこで、我々の研究ではロボットを一つの剛体のモデルと仮定し揺動を与えることで、よりシンプルな前進動作を考案しています。
1.11 全方向ホロノミック自走式精密位置決め機構
担当:渕脇研究室
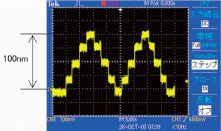
本研究で開発している自走式精密移動機構(XYθ小型自走機械)の構成を図1に示します。二つの電磁石を交互に着脱し、四つの圧電アクチュエータの伸縮を同期させることにより、尺取虫の原理で動作します。図2に示すように、全方向への直進動作、任意点での回転動作できます(X軸Y軸θ軸の独立動作)。図3にこれまでに開発された機構の写真を示します。数cm、50gと小型軽量ながら、最高速度3cm/s、分解能数10nm以下の微動を同時に実現できます。図4に25nmのステップ動作の実験例を示します。通常の単軸ステージを三段に重ねる構成だと、下のステージほど稼動部が重くなり、大きな振動を発生します。しかし、本機構はすべての動作で稼動部が50gと超軽量ですので、繰返し位置決の発生振動がほとんどありません。また軽量であることから、小さな力で大きな加速度を得ることが出来ます。積載重量は100g程度とあまり重いものを搭載できませんが、チップ部品、生体細胞、計測プローブなど、軽量かつ小型の対象物の、サブμm〜cmまでの高速精密作業を目指しています。
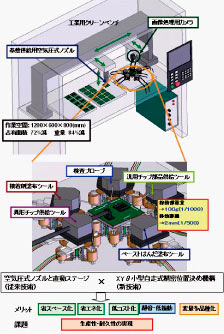
1.12 小型精密ロボット群によるチップ実装システム
担当:渕脇研究室
携帯機器に使用されるチップ部品はどんどん小型化しています。例えば、携帯電話に使用されているチップコンデンサーは0402(0.4mm×0.2mm)サイズまで小型化し、今後さらに小型化していく傾向にあります。さらに、微小ハンダ球、pl接着剤・ペーストハンダ塗布など、1mg以下の超軽量・超小型の、液体・チップ部品を、μmオーダーでマニピュレーションする技術がとても重要です。これらの作業に、本研究室で研究開発しているXYθ小型自走機械を応用すれば、小型サンプルを最小エネルギー、最小振動、で操作することが出来るのではと考え、チップ部品を小型ロボットにより実装するシステムを提案しています。従来の直動ステージと組み合わせ、低振動、クリーンルーム省スペース、多品種変量生産、省エネルギー、フレキシブルな作業システムの構築を目指します。
Copyright © 2012 Research Center for Robotics and Mechatronics. All rights reserved.
















 本研究で開発している自走式精密移動機構(XYθ小型自走機械)の構成を図1に示します。二つの電磁石を交互に着脱し、四つの圧電アクチュエータの伸縮を同期させることにより、尺取虫の原理で動作します。図2に示すように、全方向への直進動作、任意点での回転動作できます(X軸Y軸θ軸の独立動作)。図3にこれまでに開発された機構の写真を示します。数cm、50gと小型軽量ながら、最高速度3cm/s、分解能数10nm以下の微動を同時に実現できます。図4に25nmのステップ動作の実験例を示します。通常の単軸ステージを三段に重ねる構成だと、下のステージほど稼動部が重くなり、大きな振動を発生します。しかし、本機構はすべての動作で稼動部が50gと超軽量ですので、繰返し位置決の発生振動がほとんどありません。また軽量であることから、小さな力で大きな加速度を得ることが出来ます。積載重量は100g程度とあまり重いものを搭載できませんが、チップ部品、生体細胞、計測プローブなど、軽量かつ小型の対象物の、サブμm〜cmまでの高速精密作業を目指しています。
本研究で開発している自走式精密移動機構(XYθ小型自走機械)の構成を図1に示します。二つの電磁石を交互に着脱し、四つの圧電アクチュエータの伸縮を同期させることにより、尺取虫の原理で動作します。図2に示すように、全方向への直進動作、任意点での回転動作できます(X軸Y軸θ軸の独立動作)。図3にこれまでに開発された機構の写真を示します。数cm、50gと小型軽量ながら、最高速度3cm/s、分解能数10nm以下の微動を同時に実現できます。図4に25nmのステップ動作の実験例を示します。通常の単軸ステージを三段に重ねる構成だと、下のステージほど稼動部が重くなり、大きな振動を発生します。しかし、本機構はすべての動作で稼動部が50gと超軽量ですので、繰返し位置決の発生振動がほとんどありません。また軽量であることから、小さな力で大きな加速度を得ることが出来ます。積載重量は100g程度とあまり重いものを搭載できませんが、チップ部品、生体細胞、計測プローブなど、軽量かつ小型の対象物の、サブμm〜cmまでの高速精密作業を目指しています。