| |
| 2.モーションコントロール |
| Motion Control |
| 2.2 2足方向ロボットの回転の研究 担当:河村研究室 |
| |
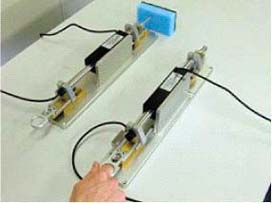
電気自動車のJC08モード航続距離を10%程度伸ばすために、直列チョッパ駆動方式実験設備を製作した。
| |
 |
 |
 |
 |
| |
(a)動作開始 |
(b)1秒後 |
(c)2秒後 |
(d)動作終了(3秒後) |
| 滑りを利用した回転 |
|
|
| 2.3 ビジュアル歩行 担当:河村研究室 |
| |
2足歩行ロボットにカメラを搭載し、ビジュアル歩行の研究を行っている。カメラ画像の特徴量をもとにサーボを行い、対象物とロボット
間の距離を一定に保つ研究を行っている。
| |
 |
 |
 |
 |
| |
T-0[sec] |
T-2[sec] |
T-9[sec] |
T-17[sec] |
| |
 |
 |
 |
 |
| |
T-23[sec] |
T-27[sec] |
T-30[sec] |
T-35[sec] |
| ビジュアル歩行用小型ロボット |
|
|
| 2.4 多自由度マニピュレータの運動制御 担当:下野研究室 |
| |
 外乱に対してロバストで高精度な運動を実現するための多自由度マニピュータの制御手法に関する研究を行っています。特に、物体押し動作など高度タスクの実現を目指した双腕マニピュレータの協調制御や、運動学的冗長性を有するマニピュレータの力制御といった、ロボットと周囲環境とのインタラクションを考慮した運動制御技術を研究しています。 外乱に対してロバストで高精度な運動を実現するための多自由度マニピュータの制御手法に関する研究を行っています。特に、物体押し動作など高度タスクの実現を目指した双腕マニピュレータの協調制御や、運動学的冗長性を有するマニピュレータの力制御といった、ロボットと周囲環境とのインタラクションを考慮した運動制御技術を研究しています。
|
| 2.5 力覚フィードバック制御 担当:下野研究室 |
| |
実際の物体と接触した際に知覚する力覚情報のリアルタイム伝送、ディジタル記録・編集、工学的再現に関する研究を行っています。
また、インターネットなどのネットワークを利用したロボットの遠隔制御技術に関する研究を行っています。
|
|
|